本文对无人机飞行的一些基本概念进行梳理记录,动力学方程相关暂不涉及。
简单的垂直与水平分析
Vertical Motion
四旋翼无人机的旋翼工作产生升力,升力与重力相等时,合力为零,此时无人机处于悬停状态(hover)。
增大无人机四旋翼推力(速度),可以实现无人机爬升(climb)。
减小无人机四旋翼推力(速度),可以实现无人机下降(descend)。
Turning or Rotating
无人机的旋转与各旋翼的旋转方向和旋转速度相关,两个相邻的电机以相反的方向旋转,两个相反的电机沿同一方向旋转。角动力值可以用角速度乘以惯性矩得到。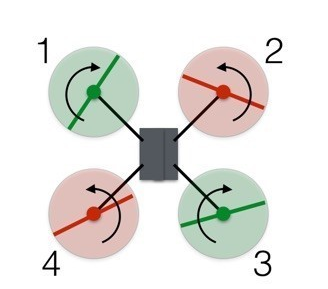
红色的旋翼呈逆时针旋转,绿色的旋翼呈顺时针旋转,如图所示。当1和3同时减小,2和4增大,保持无人机的升力依旧等于重力,实现无人机方向的改变
空间姿态与位置
基本描述
欧拉角是描述旋转的一种方式,那姿态角呢?姿态角属于欧拉角的一种特殊形式,我们一般定义姿态角为偏航(Yaw),俯仰(Pitch),横滚(Roll)。在不同的载体坐标系里,姿态角对应也不一样。
四旋翼无人机有6个自由度,分别为前后、上下、左右移动,横滚、俯仰、偏航旋转,而控制是从四个方面来进行的:升降通道(Thrust),横滚角(Roll)控制通道,俯仰角控制通道(Pitch)和偏航角控制通道(Yaw)。
下面三张动图呈现的是前后、左右、旋转的效果:
运动姿态实现
以无人机质心为原O,正前方为X轴正方向,右侧方为Y轴正方向,竖直向上为Z轴正方向建立机体坐标系,分析各种运动姿态原理,如图所示
升降运动:在图a中,同时增大无人机四个旋翼转速,使得总升力大于无人机整体重量后无人机将沿着Z轴垂直上升,反之,减小四个旋翼转速使总升力小于无人机自身重量后,无人机将垂直降落。在无外界干扰的情况下当总升力等于机体重量时无人机将保持悬停。
前后运动(pitch):如图b所示,3、4号旋翼转速增大,1、2号旋翼转速保持,前后升力差会导致无人机出现“前低后高”的姿态,旋翼推力在X轴正方向的分力将驱动无人机前进;同理当1、2号旋翼转速增大,3、4号旋翼转速不变时无人机将会后退。
左右移动(roll):与前后移动原理相同,在图c中,1、4号旋翼转速增大时无人机向左移动,2、3号旋翼转速增大时无人机向右移动。
偏航运动(yaw):如图d所示,当一对正转旋翼与一对反转旋翼转速相同时,产生的扭矩则相互抵消,无人机不旋转。和当1、3号旋翼转速增大而2、4号旋翼转速不变时,1、3号旋翼对机体产生的扭矩大于2、4号旋翼的反扭矩,因此无人机将绕Z轴进行逆时针旋转;反之,当2、4号旋翼转速大于1、3号旋翼转速时,无人机将绕Z轴顺时针旋转。
讲解视频
在MATLAB关于无人机仿真和控制的学习内容–Drone Simulation and Control, Part 1: Setting Up the Control Problem - YouTube中,对无人机控制的基本框架进行一个简要介绍,涉及控制器、执行器以及传感器,中间融入算法和预期目标等。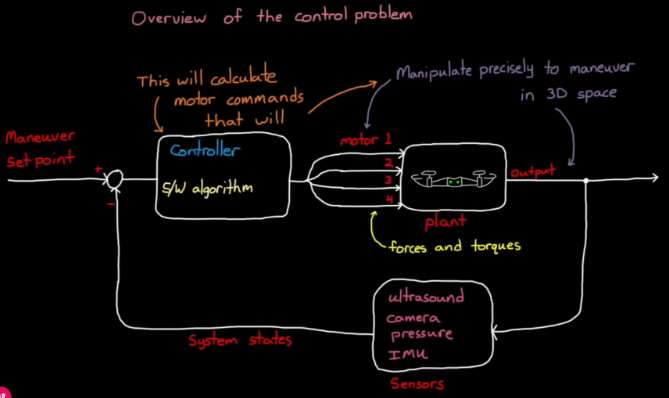
视频中尤其重点介绍了无人机几种姿态(pitch, roll, yaw, thrust) 的演示过程,讲解得通俗易懂。视频中还说明无人机同向螺旋桨为何要对向放置,涉及重心以及偏航的问题。在讲解无人机左右平移时,展示了图片,说明螺旋桨推力分解为抵消重力的分力和左右移动的分力,对上文的一个图示补充。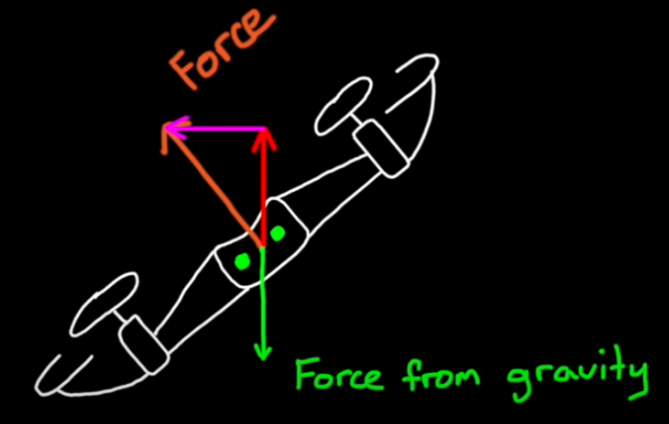
参考内容
Jared Maltos,The Flight Physics of Quadcopter Drones
Rhett Allain,How Do Drones Fly? Physics, of Course!
田家大院院士,旋翼无人机的飞行原理是什么?
MATLAB,Drone Simulation and Control, Part 1: Setting Up the Control Problem - YouTube