P450是阿木实验室出品的无人机。其官方简介为:Prometheus450(简称P450)是一款专为科研工作者及无人机开发者设计的无人机实验平台,适用于无人机专业应用研究和开发。本开发平台基于Prometheus开源项目,提供丰富的demo例程,涵盖控制模块、slam模块、规划模块以及目标检测模块等多个无人机及机器视觉相关研究方向。
常用的文档:
P450使用手册 - P系列无人机文档
Home · amov-lab/Prometheus Wiki · GitHub
Prometheus-自主无人机开源项目 - Prometheus使用手册
PX4 自动驾驶用户指南
软硬件词汇
- Prometheus:无人机开源项目,开源仿真代码以及基础机载飞行代码
- QGroundControl(QGC):地面站,连接到飞机,监控到飞机本身的状态
- Nomachine:远程桌面,用作远程连接到板载计算机
- PX4:专业级飞控
- Pixhawk:硬件平台,PX4固件对应硬件
- Mavros:mavlink+ros。mavros是PX4官方提供的一个运行于ROS下收发mavlink消息的工具,利用mavros可以发送mavlink消息给飞控(可以控制飞机),并且可以从飞控中接受数据(例如:飞控的位置速度 IMU数据等等)
- Flight Control Unit(FCU):飞行控制单元
软硬件框架
P450硬件框架

T265双目相机:采用优化后的V-SLAM算法
单目相机:200w像素,OpenCV图像识别二维码引导降落,基于OpenCV的椭圆、二维码识别及追踪
D435i深度相机:避障,物体检测和识别,大场景和快速移动跟踪
激光雷达:测量半径40m
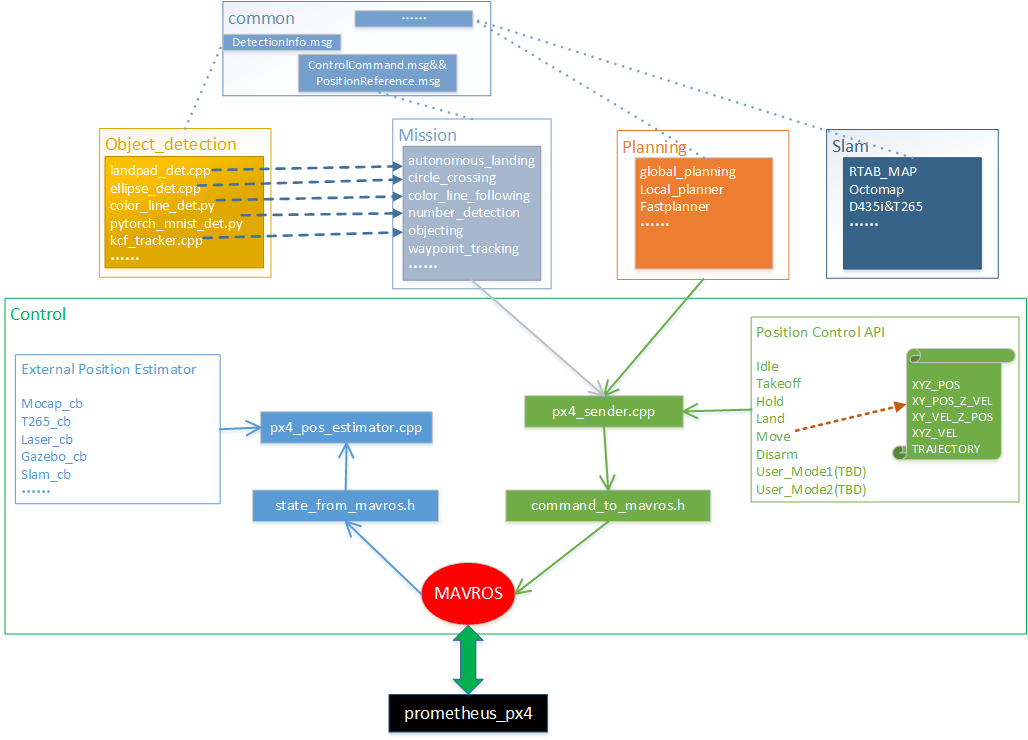
Prometheus软件框架

遥控器模式
- 定点模式:该模式下横滚和俯仰摇杆控制机体的前后左右方向相对于地面的加速度(类似于车的油门踏板),油门控制上升下降的速度。 当摇杆释放/居中时,机体将主动制动,保持水平,并锁定到 3D 空间中的位置 — 补偿风和其他力。
- 定高模式:滚转和俯仰杆控制机体在左右和前后方向上的运动(相对于机体的“前方”),偏航杆控制水平面上的旋转速度,油门控制上升 -下降的速度。当杆被释放/回中时,机体将恢复水平并保持当前的高度
- 自稳模式:飞控会让飞行器只有保持姿态是稳定的。位置不确定,需要双手操控,保持重力和升力平衡。新手不适宜操作。
- 遥控器左下上锁,右下解锁(左边的操作杆)
电池管理
- 上限是4.2V,对4S电池来说上限是16.8V
- 电池不能过充过放,使用范围应介于14.4到16.8V之间,在长期未使用的时候要让电池单电芯保持在3.85左右适宜。
功率监控
- PM接口对应pixhawk4的power module接口
- polybro的px4飞控的电源模块接口是GH1.25,CUAV家的px4飞控的电源模块接口是DF1.3,模块上红色对应5V




